Dans le cas d’un réseau souterrain, il devient difficile de localiser un défaut.
Sur un réseau en coupure d’artère ou boucle ouverte, la réalimentation des clients ne devient possible qu’après isolement du câble reconnu défectueux.
But de la détection de défauts :
Elle doit permettre d’éviter les renvois de tension sur les défauts et donc de préserver le matériel.
Elle limite les temps de coupure en fournissant une aide à la conduite du réseau grâce à des détecteurs installés sur les points de manœuvres et un voyant extérieur.
Le détecteur (généralement appelé Bardin) est constitué de plusieurs éléments :
- Un tore par câble à surveiller (figure 1)
- Une carte de détection (figure 2)
- Un voyant extérieur (figure 3)



Principe de fonctionnement :
En l’absence de défaut, le courant dans le câble est inférieur au seuil de réglage de la carte, le voyant est éteint.
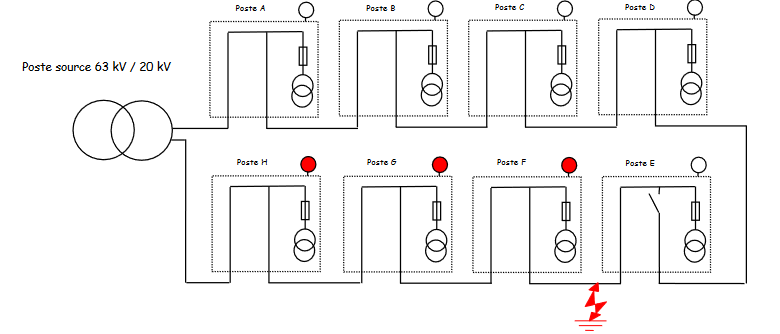
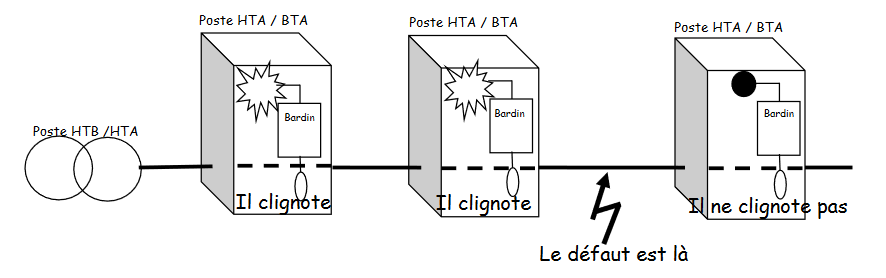
Un défaut sur le câble HTA occasionne en amont du défaut un courant important pouvant atteindre plusieurs dizaines voire plusieurs centaines d’ampères. Le seuil de réglage de la carte est dépassé, le voyant extérieur clignote.
Tous les postes en amont du défaut clignotent, ceux en aval restent éteints.
Si le défaut persiste, celui-ci va provoquer le déclenchement du disjoncteur du poste source au bout de 500 ms et couper l’alimentation des postes HTA / BTA et donc de la carte de détection.
Le défaut est mémorisé et le voyant continu du clignoter pendant 2 heures grâce à la batterie intégrée à la carte de détection.
Après isolement du câble défectueux, la remise sous tension du poste HTA / BTA provoque l’acquittement du défaut et l’arrêt du clignotement du voyant.
Exemple 1
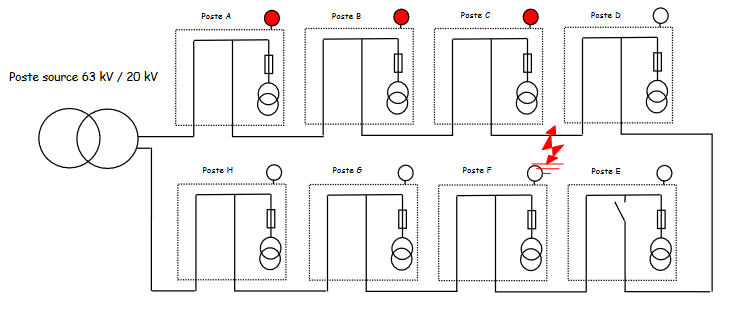
Exemple 2